 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram
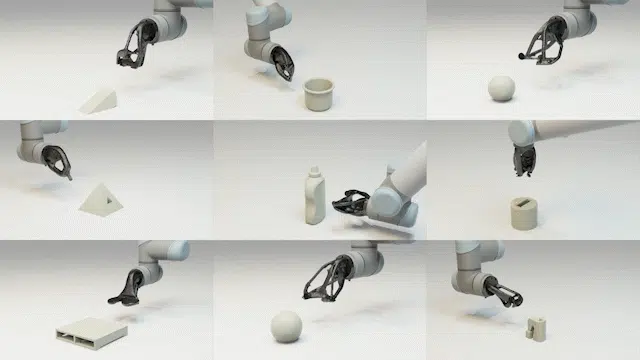
Команда Вашингтонского университета создала новый инструмент, который может спроектировать пассивный захват для 3D-печати и рассчитать наилучший путь для захвата объекта. Команда протестировала эту систему на наборе из 22 объектов, включая напечатанного на 3D-принтере кролика, клин в форме дверного упора, теннисный мяч и дрель.
Сочетая готовые компоненты с 3D-печатью, Wheelbot представляет собой симметричный одноколесный велосипед с реактивным колесом, который может запрыгивать на свои колеса из любого начального положения. Благодаря неголономной и недостаточно активируемой динамике, а также двум связанным нестабильным степеням свободы Wheelbot представляет собой сложную платформу для нелинейных и управляемых данными исследований управления.
Quad-SDK — это полнофункциональная программная среда с открытым исходным кодом на основе ROS для гибкого четвероногого передвижения. Дизайн Quad-SDK ориентирован на вертикальную интеграцию инструментов планирования, управления, оценки, коммуникации и разработки, которые обеспечивают гибкое передвижение на четвероногих в моделировании и оборудовании с минимальными изменениями пользователя для нескольких платформ.
Zenta производит одних из лучших роботов с ногами, в том числе MorpHex, который, похоже, все еще набирает обороты.
А теперь расслабляющая поездка с MXPhoenix:
Мы разработали набор стратегий телеуправления с использованием жестов и движений рук человека, чтобы полностью дистанционно управлять ножным манипулятором посредством контроля всего тела. Чтобы проверить систему, была проведена демонстрация утилизации предметов из мусорного ведра с педалью, чтобы показать, что робот может использовать свою кинематику, чтобы следовать командам человека, соблюдая при этом определенные ограничения движения, такие как сохранение равновесия.
Знакомство с линейкой модульных мобильных баз HEBI Robotics для ограниченного пространства, грязной среды и магнитного ползания.
Loopy — это роботизированный рой агентов с 1 степенью свободы (DOF) (т. е. замкнутый цикл, состоящий из 36 сервоприводов Dynamixel). В этой итерации Loopy агенты используют средний консенсус, чтобы определить ориентацию полученной формы, которая требует наименьшего количества движений. В этом видео Лупи произносит алфавит.
Новейшая робототехника от DLR, которой поделился Брэм Вандерборхт.
Выбор определенного объекта из беспорядка является важным компонентом многих задач манипуляции. Частичные наблюдения часто требуют, чтобы робот собирал дополнительные виды сцены, прежде чем пытаться схватить ее. В этой статье предлагается планировщик следующего наилучшего вида с обратной связью, который управляет исследованием на основе закрытых частей объекта.
Эта новая летательная система сочетает в себе автономный беспилотный летательный аппарат с георадаром для обнаружения подземных объектов, таких как наземные мины. Система отличается особыми датчиками маневров полета на малой высоте и высокоточной оценкой местоположения. Эксперименты показывают радарное обнаружение целей, зарытых в песок.
В этом эксперименте мы демонстрируем комбинированную исследовательскую и инспекционную миссию с использованием устойчивого к столкновениям воздушного робота RMF-Owl на объектах Nutec RelyOn в Тронхейме, Норвегия. Перед роботом поставлена задача автономно исследовать и осматривать поверхности окружающей среды — в пределах заданной высоты — с датчиком бортовой камеры, не имеющим предварительного знания карты.
Доставка пончиков нашей невероятной команде разработчиков Turtlebot 4! Включает полное пошаговое руководство картографическими и навигационными возможностями мобильного робота Turtlebot 4 с Мэдди Томсон, дизайнером демонстраций робототехники из Clearpath Robotics. Создайте карту своей среды с помощью SLAM Toolbox и узнайте, как заставить Turtlebot 4 самостоятельно перемещаться по этой карте к месту назначения с помощью навигационного стека ROS 2.
Будьте в курсе в удобном формате, присоединяйтесь: TG-канал и ВК
Бесплатная служба распространения новостей для научных организаций и стартапов
hello@technovery.com



