 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram

DeepMind, исследовательская лаборатория искусственного интеллекта и дочерняя компания Alphabet, в октябре 2021 года приобрела физический движок MuJoCo для исследований и разработок в области робототехники. План состоял в том, чтобы открыть исходный код симулятора и поддерживать его как бесплатный проект с открытым исходным кодом, управляемый сообществом. По словам DeepMind, открытый исходный код завершен, и вся кодовая база находится на GitHub .
MuJoCo, что означает Multi-Joint Dynamics with Contact, представляет собой физический движок, целью которого является содействие исследованиям и разработкам в области робототехники, биомеханики, графики и анимации, а также в других областях, где требуется быстрое и точное моделирование.
MuJoCo можно использовать для реализации вычислений на основе моделей, таких как синтез управления, оценка состояния, идентификация системы, проектирование механизмов, анализ данных с помощью обратной динамики и параллельная выборка для приложений машинного обучения. Его также можно использовать как более традиционный симулятор, в том числе для игр и интерактивных виртуальных сред.
DeepMind заявил, что следующие функции делают MuJoCo привлекательным для сотрудничества:
— Полнофункциональный симулятор, способный моделировать сложные механизмы
— Читаемый, производительный, переносимый код
— Легко расширяемая кодовая база
— Подробная документация: комментарии как для пользователя, так и для кода
Мы надеемся, что коллеги из академических кругов и сообщества OSS получат пользу от этой платформы и внесут свой вклад в кодовую базу, улучшая исследования для всех.
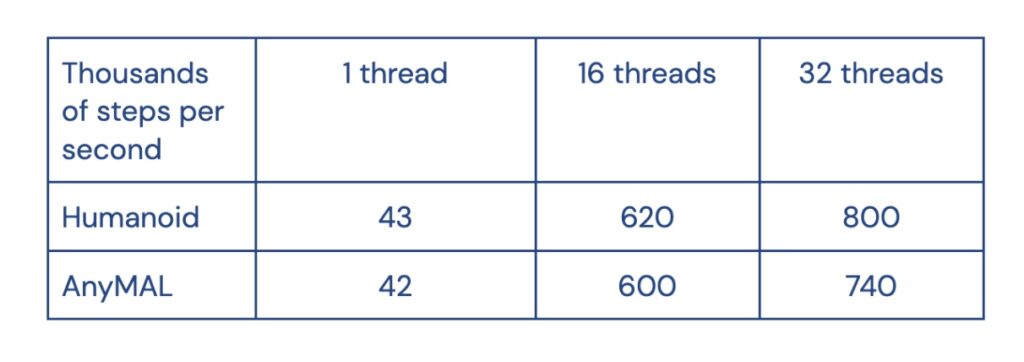
«На данный момент мы хотели бы поделиться некоторыми результатами тестирования двух распространенных моделей. Результаты были получены на стандартной машине AMD Ryzen 9 5950X под управлением Windows 10».
Что касается краткосрочной дорожной карты, DeepMind заявила, что она раскроет потенциал скорости MuJoCo за счет пакетного многопоточного моделирования, поддержки больших сцен с улучшениями в управлении внутренней памятью и представит новый инкрементный компилятор с лучшей компоновкой моделей. DeepMind также заявила, что создаст поддержку для лучшего рендеринга через интеграцию с Unity и добавит встроенную поддержку.
До приобретения DeepMind использовала MuJoCo в качестве платформы моделирования для различных проектов, в основном через свой стек Python dm_control. В нем было выделено несколько примеров робототехники, которые вы можете посмотреть в плейлисте ниже.
Бесплатная служба распространения новостей для научных организаций и стартапов
hello@technovery.com



