 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram

У летучих мышей есть врожденная способность передвигаться в темноте, даже если они не могут визуально воспринимать свое окружение. Эта захватывающая способность основана на излучении ими ультразвуковых сигналов, которые создают уникальные эхо-сигналы, предоставляющие информацию о местонахождении близлежащих интересующих объектов или препятствий.
Разработка роботов с аналогичными возможностями локализации на основе звука может иметь значительные преимущества, поскольку это может снизить их зависимость от сложных и дорогих сенсорных систем (например, камер, лидаров и т. д.). Это может снизить затраты на производство этих роботов, что в конечном итоге облегчит их крупномасштабное развертывание.
Исследователи из EPFL недавно создали новую платформу для локализации и картографирования на основе звука в беспилотных летательных аппаратах (БПЛА), широко известных как дроны. Эта структура, представленная в статье, опубликованной в IEEE Robotics and Automation Letters , основана на использовании простых зуммеров и недорогих микрофонов.

«Нас интересовало, можно ли использовать микрофоны для пространственной навигации роботов, в частности дронов», — рассказал Tech Xplore Фредерике Дюмбген, один из исследователей, проводивших исследование.
«Микрофоны уже добавлены ко многим роботам для других задач, особенно для общения с людьми, поэтому их использование для навигации не потребует дополнительных затрат на оборудование. Мы были оптимистичны, что это возможно, основываясь на способностях летучих мышей: эти животные ориентируются ночью и в своих пещерах, используя в основном звук с удивительной производительностью».
В то время как в некоторых предыдущих исследованиях пытались добиться бессенсорной локализации с помощью ультразвука, аналогичного тому, который излучают летучие мыши, Дюмбген и ее коллеги решили создать систему локализации и картирования, которая полагалась бы только на слышимые звуки. Такой подход может значительно снизить стоимость и вес изготовления робота, поскольку зуммеры и микрофоны часто уже доступны на роботах.
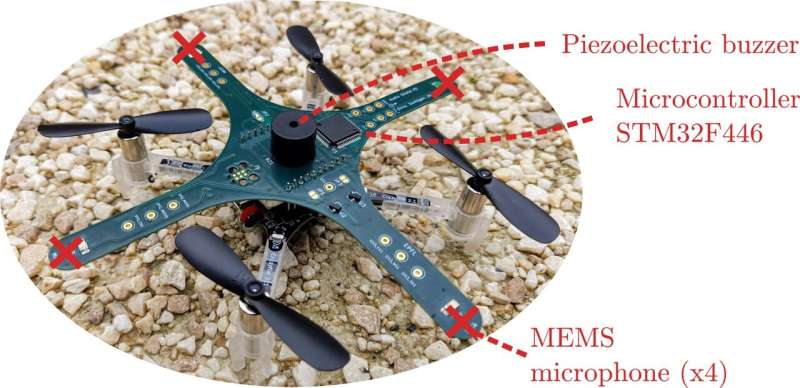
«При разработке наших новых алгоритмов навигации на основе звука мы учли эти факторы, поскольку хотели, чтобы они эффективно работали на любой платформе, где есть хотя бы один микрофон и динамик», — пояснил Дюмбген. «В частности, мы продемонстрировали наш алгоритм на платформах с дешевыми MEMS-микрофонами и зуммерами, а не с дорогими измерительными микрофонами и громкоговорителями».
Это работает следующим образом: роботы издают частотные развертки через ряд встроенных зуммеров, а затем используют ответ, который эти развертки вызывают в бортовых микрофонах, для обнаружения стен в их окружении.
«Если вокруг сильный отражатель, такой как стена, звук отражается, и отраженный звук взаимодействует с прямым звуком в каждом микрофоне», — сказал Дюмбген. «В зависимости от расстояния и частоты эти два сигнала либо ослабляют, либо усиливают друг друга. Поэтому, глядя на громкость сигнала микрофона на излучаемых частотах, мы можем определить, есть ли поблизости отражатель и на каком расстоянии он находится».
Используя несколько микрофонов и измерения, собранные в последующих положениях, система команды также может определить угол, под которым отражатель находится по отношению к роботу .
Основное преимущество этой звуковой системы локализации и отображения по сравнению с ранее предложенными подходами заключается в том, что она не требует особо сложных микрофонов и динамиков.
Это связано с тем, что он использует звуковые помехи, а не данные о времени полета. Это позволяет ему генерировать более длинные сигналы, обеспечивая хорошее отношение сигнал/шум даже при использовании дешевых аппаратных компонентов и устраняя необходимость точного управления синхронизацией собранных измерений.


«Исследуя эхолокацию на дроне Crazyflie, мы определили основные проблемы, с которыми должны справляться надежные алгоритмы эхолокации, разработанные для дронов, а именно неопределенность движения и переменный шум пропеллера», — сказал Дюмбген.
«Мы надеемся, что результаты могут стать хорошей отправной точкой для дальнейших исследований, чтобы продолжать расширять границы эхолокации для робототехники. С этой целью мы открыли полный программный и аппаратный стек, чтобы снизить планку входа для заинтересованных робототехников. в изучении звуковой модальности для пространственной навигации роботов».
В будущем система, созданная этой группой исследователей, может быть использована для создания недорогих и легких роботов, которые могут перемещаться по окружающей среде с помощью звуков, без необходимости использования передовых датчиков, таких как камеры. Одним из интересных направлений исследований было бы создание новой системы, которая использует собственный шум пропеллера дрона для достижения эхолокации вместо активного источника звука.
Дополнительная информация: Фредерике Думбген и др., Слепой как летучая мышь: звуковая эхолокация маленьких роботов, IEEE Robotics and Automation Letters (2022). DOI: 10.1109/LRA.2022.3194669
Будьте в курсе в удобном формате, присоединяйтесь: TG-канал и ВК
Бесплатная служба распространения новостей для научных организаций и стартапов
hello@technovery.com



