 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram

Наши дороги однажды могут стать безопаснее благодаря системе совершенно нового типа, которая преодолевает некоторые ограничения лидара. Лидар, который использует импульсные лазеры для картографирования объектов и сцен, помогает автономным роботам, транспортным средствам и дронам ориентироваться в окружающей среде. Новая система представляет собой первый случай, когда возможности обычных лидарных систем со сканированием луча были объединены с возможностями более нового трехмерного подхода, известного как флэш-лидар.
В журнале Optica исследователи под руководством Сусуму Нода из Киотского университета в Японии описывают свою новую немеханическую 3D- лидарную систему, которая умещается на ладони. Они также показывают, что его можно использовать для измерения расстояния до плохо отражающих объектов и автоматического отслеживания движения этих объектов.
«Благодаря нашей лидарной системе роботы и транспортные средства смогут надежно и безопасно перемещаться в динамичной среде, не теряя из виду плохо отражающие объекты, такие как автомобили из черного металла», — сказал Нода. «Внедрение этой технологии, например, в автомобили, сделало бы автономное вождение более безопасным».
Новая система стала возможной благодаря уникальному источнику света, который исследователи разработали под названием фотонно-кристаллический лазер с двойной модуляцией (DM-PCSEL). Поскольку этот источник света основан на чипе, в конечном итоге он может позволить разработать полностью твердотельную трехмерную лидарную систему на кристалле.
«DM-PCSEL объединяет немеханическое сканирование луча с электронным управлением и импульсную подсветку, используемую во флэш-лидаре, для получения полного трехмерного изображения с помощью одной вспышки света», — сказал Нода. «Этот уникальный источник позволяет нам получать как вспышку, так и сканирующее освещение без каких-либо движущихся частей или громоздких внешних оптических элементов, таких как линзы и дифракционные оптические элементы».
Сочетание сканирования и вспышки
Лидарные системы отображают объекты в поле зрения, освещая эти объекты лазерными лучами , а затем вычисляя расстояние до этих объектов, измеряя время пролета лучей (ToF) — время, которое требуется свету, чтобы добраться до объектов, отразиться и затем вернуться. к системе. Большинство используемых и разрабатываемых лидарных систем полагаются на движущиеся части, такие как двигатели для сканирования лазерного луча, что делает эти системы громоздкими, дорогими и ненадежными.
Один немеханический подход, известный как флэш-лидар, одновременно освещает и оценивает расстояния до всех объектов в поле зрения с помощью одного широкого рассеянного луча света. Однако системы флэш-лидара нельзя использовать для измерения расстояний до плохо отражающих объектов, таких как черные металлические автомобили, из-за очень малого количества света, отраженного от этих объектов. Эти системы также имеют тенденцию быть большими из-за внешних линз и оптических элементов, необходимых для создания луча вспышки.
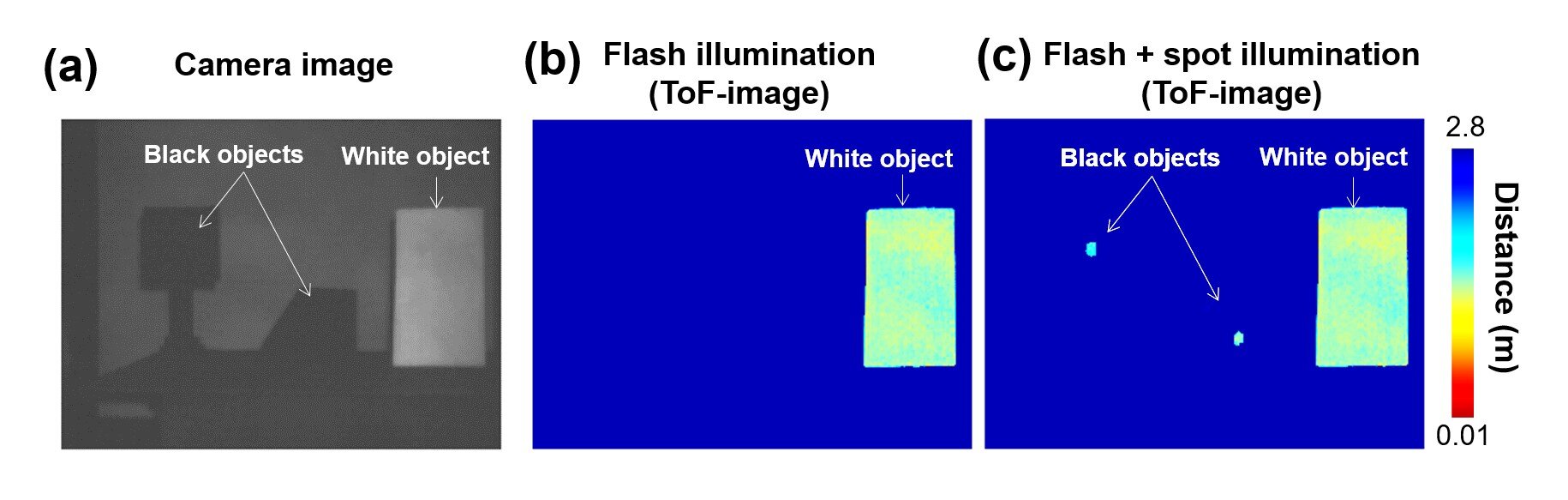
(a) Изображение с камеры показывает один белый объект с высокой отражающей способностью и два черных объекта с низкой отражающей способностью для измерения расстояния. (b): Измерения расстояний, полученные новой лидарной системой с использованием только импульсного лазерного источника, показывают, что расстояния до черных объектов не могут быть измерены. (c): Измерения, полученные с помощью новой лидарной системы с использованием импульсных и сканирующих лазерных источников, позволяют одновременно определять расстояния до черных и белых объектов.
Авторы и права: Сусуму Нода, Киотский университет.
Чтобы устранить эти критические ограничения, исследователи разработали источник света DM-PCSEL, который может освещать широкое поле зрения 30 ° × 30 °, так и источник сканирования луча, который обеспечивает точечное освещение 100 узкими лазерными лучами.
Ученые включили DM-PCSEL в трехмерную лидарную систему, которая позволила им измерять расстояния до многих объектов одновременно, используя широкую вспышку, а также выборочно освещая плохо отражающие объекты более концентрированным лучом света. Исследователи также установили камеру ToF для измерения расстояния и разработали программное обеспечение, которое позволяет автоматически отслеживать движение плохо отражающих объектов с помощью сканирующего луча освещения.
Измерение объектов с различной отражательной способностью
«Наша трехмерная лидарная система на основе DM-PCSEL позволяет нам одновременно определять объекты с высокой и низкой отражающей способностью», — сказал Нода. «Лазеры, камера ToF и все сопутствующие компоненты, необходимые для работы системы, были собраны компактно, в результате чего общая площадь системы меньше визитной карточки».
Исследователи продемонстрировали новую лидарную систему, используя ее для измерения расстояний до плохо отражающих объектов, размещенных на столе в лаборатории. Они также показали, что система может автоматически распознавать плохо отражающие объекты и отслеживать их движение с помощью выборочного освещения.
В настоящее время исследователи работают над демонстрацией системы в практических приложениях, таких как автономное движение роботов и транспортных средств. Они также хотят посмотреть, позволит ли замена ToF-камеры более оптически чувствительной однофотонной матрицей лавинных фотодиодов измерять объекты на еще больших расстояниях.
Дополнительная информация: Менака Зойса и др., Немеханическая трехмерная система LiDAR, основанная на фотонно-кристаллических лазерах со вспышкой и сканированием луча с двойной модуляцией, Optica (2023). DOI: 10.1364/ОПТИКА.472327
Будьте в курсе в удобном формате, присоединяйтесь: TG-канал и ВК
Бесплатная служба распространения новостей для научных организаций и стартапов
hello@technovery.com



