 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram
Несмотря на то, что у роботов нет глаз с сетчаткой, ключ к тому, чтобы помочь им видеть и взаимодействовать с миром более естественно и безопасно, может лежать в аппаратах оптической когерентной томографии (ОКТ), которые обычно находятся в кабинетах офтальмологов.
Одной из технологий обработки изображений, которую многие компании, производящие робототехнику, интегрируют в свои сенсорные пакеты, является обнаружение света и определение дальности, или сокращенно LiDAR. В настоящее время этот подход привлекает большое внимание и инвестиции со стороны разработчиков беспилотных автомобилей. Этот подход по сути работает как радар, но вместо того, чтобы посылать широкие радиоволны и искать отражения, он использует короткие импульсы света от лазеров.
Однако традиционный времяпролетный LiDAR имеет много недостатков, которые затрудняют его использование во многих приложениях для трехмерного зрения. Поскольку для этого требуется обнаружение очень слабых сигналов отраженного света, другие системы LiDAR или даже окружающий солнечный свет могут легко перегрузить детектор. Он также имеет ограниченное разрешение по глубине и может занимать опасно много времени для плотного сканирования большой площади, такой как шоссе или фабричный цех. Чтобы решить эти проблемы, исследователи обращаются к форме LiDAR, называемой LiDAR с частотно-модулированной непрерывной волной (FMCW).
«FMCW LiDAR использует тот же принцип работы, что и OCT, который в области биомедицинской инженерии развивается с начала 1990-х годов», — сказал Руобинг Цянь, доктор философии. студент, работающий в лаборатории Джозефа Изатта, заслуженного профессора биомедицинской инженерии Майкла Дж. Фицпатрика в Университете Герцога. «Но 30 лет назад никто не знал, что появятся автономные автомобили или роботы, поэтому технология была сосредоточена на визуализации тканей. Теперь, чтобы сделать ее полезной для других новых областей, нам нужно обменять ее возможности с чрезвычайно высоким разрешением на большее расстояние. и скорость».
В статье, опубликованной 29 марта в журнале Nature Communications, команда Дьюка демонстрирует, как несколько приемов из их исследования ОКТ, могут улучшить пропускную способность предыдущего FMCW LiDAR в 25 раз, сохраняя при этом субмиллиметровую точность глубины.
ОКТ — это оптический аналог ультразвука, который работает, посылая звуковые волны в объекты и измеряя, сколько времени им требуется, чтобы вернуться. Чтобы рассчитать время возвращения световых волн, устройства ОКТ измеряют, насколько сместилась их фаза по сравнению с идентичными световыми волнами, которые прошли такое же расстояние, но не взаимодействовали с другим объектом.
FMCW LiDAR использует аналогичный подход с некоторыми изменениями. Технология посылает лазерный луч, который постоянно переключается между разными частотами. Когда детектор собирает свет для измерения времени его отражения, он может отличить определенную частотную характеристику от любого другого источника света, что позволяет ему работать во всех условиях освещения с очень высокой скоростью. Затем он измеряет любой фазовый сдвиг относительно беспрепятственных лучей, что является гораздо более точным способом определения расстояния, чем существующие системы LiDAR.
«Было очень интересно увидеть, как технология визуализации биологических клеток, над которой мы работали в течение десятилетий, может быть непосредственно преобразована в крупномасштабное трехмерное зрение в реальном времени», — сказал Изатт. «Это именно те возможности, которые необходимы роботам, чтобы безопасно видеть людей и взаимодействовать с ними или даже заменять аватары живым 3D-видео в дополненной реальности».
Большинство предыдущих работ с использованием LiDAR основывались на вращающихся зеркалах для сканирования ландшафта лазером. Хотя этот подход работает хорошо, он принципиально ограничен скоростью механического зеркала, независимо от того, насколько мощный лазер он использует.
Вместо этого исследователи Дьюка используют дифракционную решетку, которая работает как призма, разбивая лазер на радугу частот, которые распространяются по мере удаления от источника. Поскольку исходный лазер по-прежнему быстро проходит через диапазон частот, это приводит к тому, что луч LiDAR перемещается намного быстрее, чем может вращаться механическое зеркало. Это позволяет системе быстро охватить большую площадь без потери глубины или точности определения местоположения.
В то время как устройства ОКТ используются для профилирования микроскопических структур на глубине до нескольких миллиметров внутри объекта, роботизированным системам 3D-зрения нужно только локализовать поверхности объектов человеческого масштаба. Для этого исследователи сузили диапазон частот, используемых ОКТ, и искали только пиковый сигнал, генерируемый поверхностями объектов. Это немного снижает разрешение системы, но с гораздо большей дальностью изображения и скоростью, чем традиционный LiDAR.
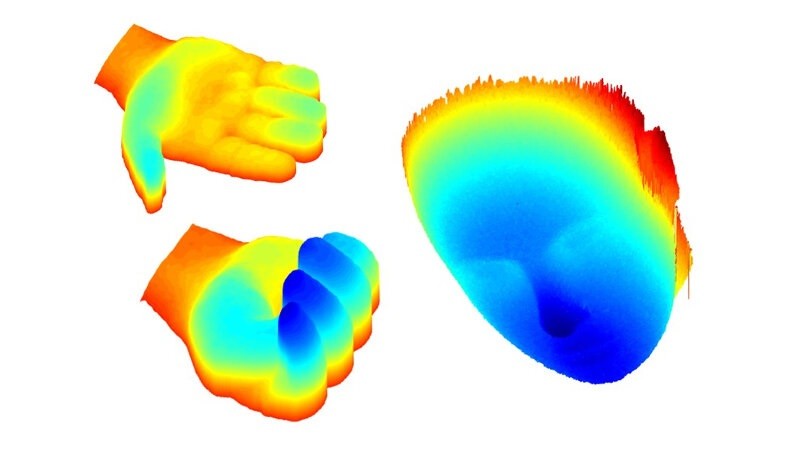
Результатом стала система FMCW LiDAR, которая обеспечивает субмиллиметровую точность локализации и пропускную способность данных в 25 раз выше, чем в предыдущих демонстрациях. Результаты показывают, что этот подход является достаточно быстрым и точным, чтобы фиксировать детали движущихся частей человеческого тела, таких как кивая головой или сжатые руки, в режиме реального времени.
Дополнительная информация: Ruobing Qian et al., Высокоточное когерентное 3D-измерение с частотно-временным мультиплексированием с видеоскоростью, Nature Communications (2022). DOI: 10.1038/s41467-022-29177-9
Будьте в курсе в удобном формате, присоединяйтесь: TG-канал и ВК
Бесплатная служба распространения новостей для научных организаций и стартапов
hello@technovery.com



