 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram

Исследователи из Бристольского университета продемонстрировали, как новый специальный тип камеры может построить наглядную карту того, где камера была, и использовать эту карту, чтобы узнать, где она сейчас находится, что будет невероятно полезно при разработке интеллектуальных датчиков автомобилей без водителя и робототехники.
Информация о том, где вы находитесь на карте, является одним из самых полезных элементов информации при навигации. Это позволяет вам планировать, куда идти дальше, а также отслеживать, где вы были раньше. Это важно для интеллектуальных устройств, от роботов-пылесосов до дронов-доставщиков и носимых датчиков, следящих за нашим здоровьем.
Но одним важным препятствием является то, что системы, которым необходимо создавать или использовать карты, очень сложны и обычно полагаются на внешние сигналы, такие как GPS, которые не работают в помещении или требуют большого количества энергии из-за большого количества задействованных компонентов.
Вальтерио Майоль-Куэвас, профессор робототехники, компьютерного зрения и мобильных систем факультета компьютерных наук Бристольского университета, возглавил команду, которая разрабатывала эту новую технологию.
Он сказал: «Мы часто принимаем как должное такие вещи, как наши впечатляющие пространственные способности. Возьмем для примера пчел или муравьев. Было доказано, что они могут использовать визуальную информацию для передвижения и достижения очень сложной навигации, и все это без GPS и большого количества энергопотребления.
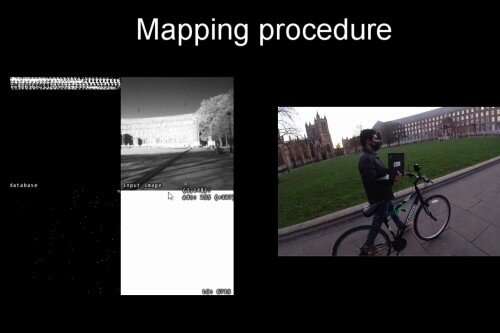
Справа: система перемещается по пространству. Слева: отображается новое изображение и принимается решение добавить его или нет в визуальный каталог (вверху слева), это графическая карта, которую затем можно использовать для локализации системы позже. . Предоставлено: Бристольский университет.
«В значительной степени это связано с тем, что их визуальные системы чрезвычайно эффективны и хорошо настроены для создания и использования карт, а роботы пока не могут конкурировать с ними».
Однако новое поколение устройств сенсор-процессор, которое команда называет Pixel Processor Array (PPA), позволяет обрабатывать данные прямо на сенсоре. Это означает, что по мере распознавания изображений устройство может решить, какую информацию сохранить, какую информацию удалить, и использовать только то, что ему нужно для выполнения текущей задачи.
Примером такого устройства PPA является архитектура SCAMP, разработанная коллегами из Манчестерского университета Петром Дудеком, профессором схем и систем из Манчестерского университета, и его командой. Этот PPA имеет один небольшой процессор для каждого пикселя, что позволяет выполнять массовые параллельные вычисления на самом датчике.
Команда из Бристольского университета ранее продемонстрировала, как эти новые системы могут распознавать объекты со скоростью тысячи кадров в секунду, но новое исследование показывает, как устройство сенсор-процессор может создавать карты и использовать их во время захвата изображения.
Эта работа была частью магистерской диссертации Гектора Кастильо-Элизальде, получившего степень магистра робототехники в Бристольском университете. Его курировал Яньан Лю, который также защищает докторскую диссертацию. по той же теме что и доктор Лори Боз.
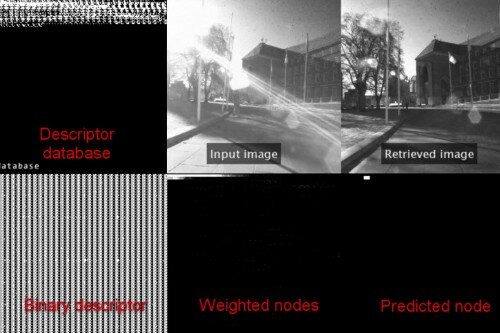
Во время локализации поступающее изображение сравнивается с визуальным каталогом (база данных дескрипторов), и если совпадение обнаружено, система сообщит, где оно находится (предсказанный узел, маленький белый прямоугольник вверху) относительно каталога. Обратите внимание на то, как система может сопоставлять изображения, даже если есть изменения в освещении или объекты, такие как движущиеся люди. Предоставлено: Бристольский университет.
Гектор Кастильо-Элизальде и его команда разработали алгоритм отображения, который запускает все на борту устройства сенсор-процессор.
Алгоритм обманчиво прост: когда появляется новое изображение, алгоритм решает, достаточно ли оно отличается от того, что он видел раньше. Если это так, он сохранит некоторые из своих данных, если нет, он их отбросит.
Когда устройство PPA перемещается, например, человеком или роботом, оно будет собирать визуальный каталог представлений. Затем этот каталог можно использовать для сопоставления любого нового изображения, когда оно находится в режиме локализации.
Важно отметить, что изображения не выходят из PPA, только ключевые данные, указывающие, где они находятся по отношению к визуальному каталогу. Это делает систему более энергоэффективной, а также помогает сохранить конфиденциальность.
Команда считает, что этот тип искусственных визуальных систем, которые разрабатываются для визуальной обработки, а не обязательно для записи изображений, является первым шагом на пути к созданию более эффективных интеллектуальных систем, которые могут использовать визуальную информацию для понимания мира и перемещения по нему. Крошечным, энергоэффективным роботам или умным очкам, которые делают полезные вещи для планеты и людей, потребуется пространственное понимание, которое будет исходить от умения создавать и использовать карты.
Дополнительная информация: Взвешенное сопоставление узлов и локализация в массиве пиксельных процессоров. www.researchgate.net/publicati… ixel_Processor_Array
Иллюстрация: Обзор отображения на датчике. Система перемещается и по мере этого создает визуальный каталог того, что она наблюдает. Это карта, которая позже используется, чтобы узнать, был ли он там раньше. Предоставлено: Бристольский университет.
Будьте в курсе в удобном формате, присоединяйтесь: TG-канал и ВК



