 Платформа
Платформа Добавить публикацию
Добавить публикацию Реклама
Реклама Центр инноваций
Центр инноваций Партнеры
Партнеры hello@technovery.com
hello@technovery.com telegram
telegram
Ножные роботы имеют значительные преимущества перед колесными и гусеничными роботами, особенно когда речь идет о перемещении по разным типам местности. Это делает их особенно подходящими для миссий, связанных с транспортировкой товаров или перемещением из одного места в другое.
Один многообещающий подход, который позволяет роботам на ногах эффективно справляться с этими задачами, особенно теми, которые связаны с дальними путешествиями, заключается в том, чтобы научить их следовать за «лидером», будь то конкретный автомобиль или агент-человек. Однако этого может быть трудно достичь, особенно при разном освещении и разных атмосферных условиях.
Исследователи из Шаньдунского университета в Китае недавно разработали новую структуру , которая может дать четвероногим роботам возможность следовать за лидером как в ночное, так и в дневное время. Эта структура, представленная в журнале Biomimetics MDPI , основана на технологии визуального обнаружения и обнаружения с помощью LiDAR.
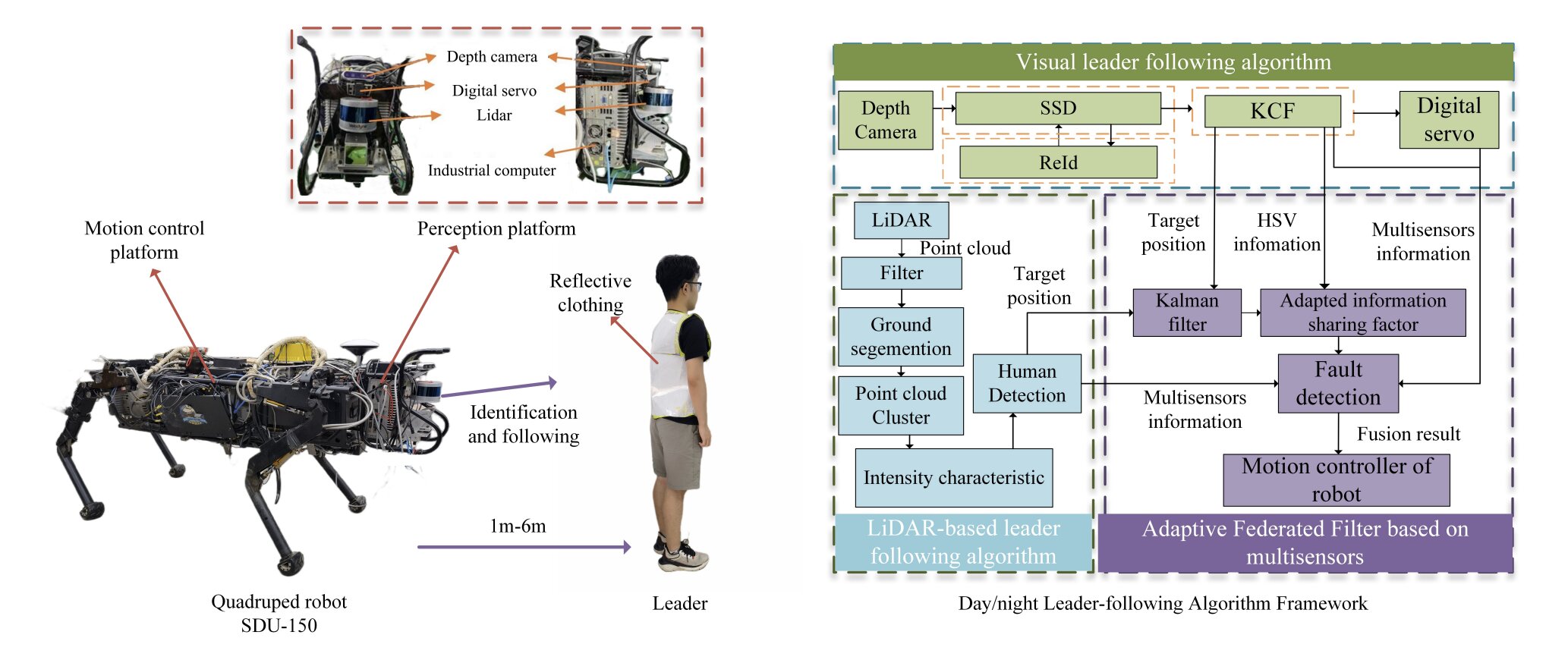
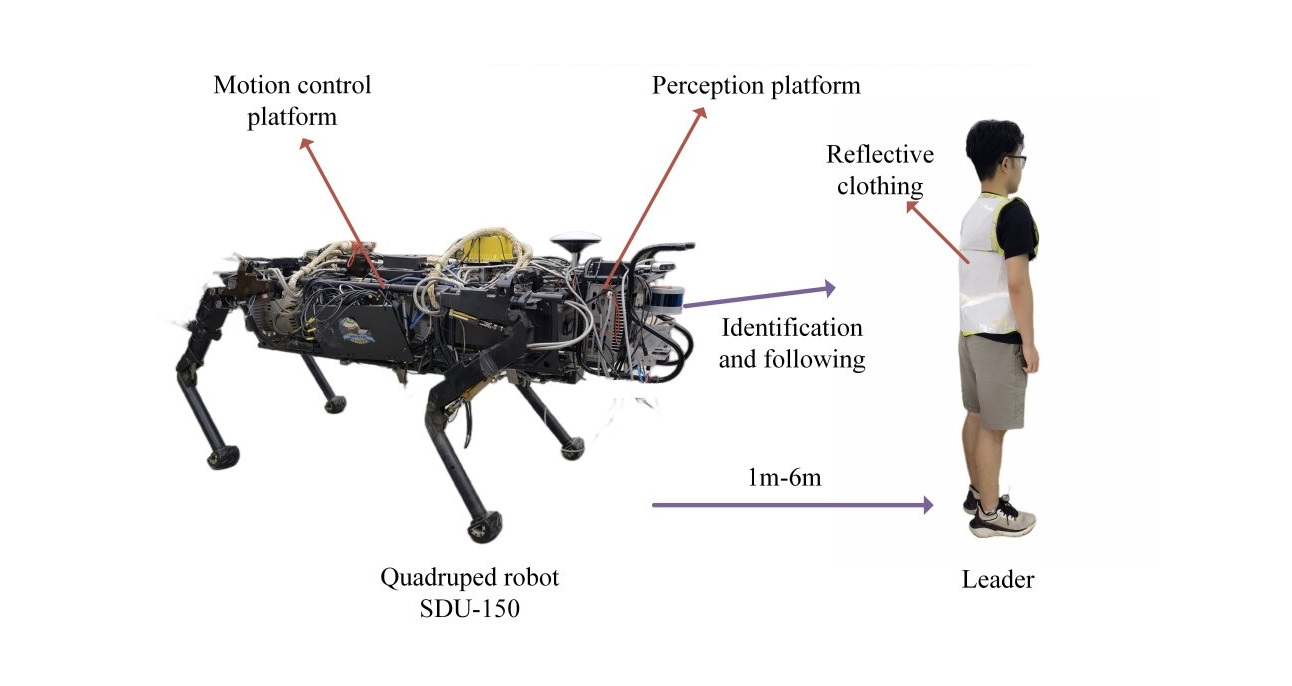
Чтобы быть эффективными, системы следования за лидером должны позволять роботам точно обнаруживать и идентифицировать конкретных людей в различных условиях освещения, чтобы они могли затем следовать за ними в нужное место. Метод, предложенный Чжаном, Го и их коллегами, позволяет достичь этого с помощью трех разных модулей: обнаружения человека, модуля связи и модуля управления движением.
«Мы создаем структуру алгоритма Adaptive Federated Filter, которая объединяет метод визуального следования за лидером и алгоритм обнаружения LiDAR, основанный на интенсивности отражения», — написали Чжан и его коллеги в своей статье. «Кроме того, фреймворк использует фильтр Калмана и адаптивно регулирует коэффициент обмена информацией в зависимости от условий освещения. В частности, фреймворк использует обнаружение ошибок и информацию с нескольких датчиков для стабильного следования за лидером днем и ночью».
Уникальной особенностью фреймворка следования за лидером, представленного исследователями, является использование в нем алгоритма обнаружения и изоляции неисправностей, который предназначен для значительного повышения его производительности как в дневных, так и в ночных условиях. Этот алгоритм основан на данных, собранных несколькими различными датчиками, и на вычислениях, выполняемых алгоритмом обнаружения, которые позволяют ему адаптироваться к высокочастотным вибрациям, различным уровням освещения и возможным визуальным помехам, вызванным отражающими материалами в окружающей среде.
Чжан, Го и их коллеги оценили предложенную ими структуру в серии испытаний с использованием SDU-150, четвероногого робота , разработанного в Шаньдунском университете. Эти тесты дали очень многообещающие результаты, так как робот смог надежно и эффективно определять лидеров в различных сценариях. Робот тестировался как в помещении, так и на улице, днем и ночью и при разном освещении.
В будущем структура следования за лидером, разработанная этой группой исследователей, может помочь улучшить способности следования за лидером других существующих и недавно разработанных роботов. Кроме того, потенциально это может вдохновить на разработку аналогичных подходов, предназначенных для повышения способности роботов обнаруживать и отслеживать определенные цели в различных условиях освещения.
Дополнительная информация: Цзялин Чжан и др., Метод следования за лидером в течение дня и ночи, основанный на адаптивном федеративном фильтре для четвероногих роботов, Biomimetics (2023). DOI: 10.3390/biomimetics8010020
Будьте в курсе в удобном формате, присоединяйтесь: TG-канал и ВК
Бесплатная служба распространения новостей для научных организаций и стартапов
hello@technovery.com



